实时手势识别(C++与python都可实现)

标签: 实时手势识别
2023-03-22 12:56:58 459浏览
一、前提配置:
Windows,visual studio 2019,opencv,python10,opencv-python,numpy,tensorflow,mediapipe,math
1.安装python环境
这里我个人使用的安装python10(google官方使用的python8)
安装相应的包,python路径添加到系统路径去,方便使用pip
pip install mediapipe opencv-python
pip install numpy==1.22.4
pip install tensorflow-cpu
二、基于python手势识别
打开运行infer.py
如果能正常运行使用,说明python环境没有问题。
infer.py下载在我gitee上,下面是链接地址
https://gitee.com/cnlycs/hand_static-lib/tree/master
如果只是使用python进行手势识别的话,把infer进行魔改就到此已经完成了
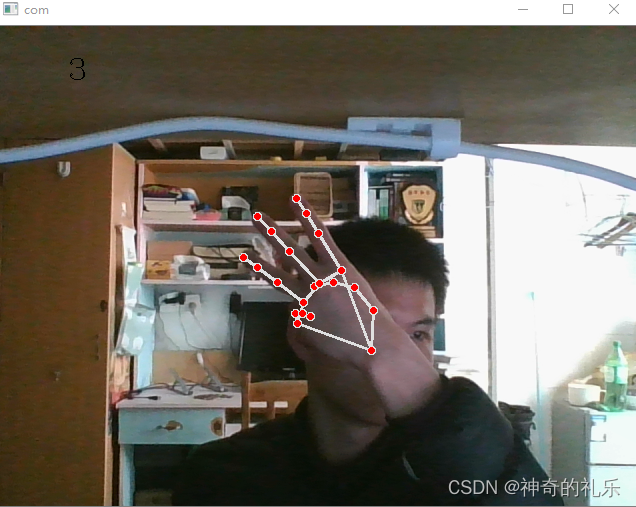
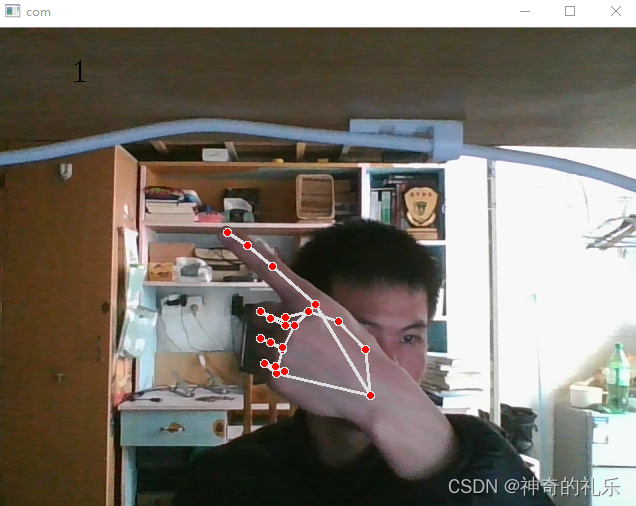
看看效果
0

label一共为[0,1,2,3,4,5]
三、C++实现
前面python的配置都得安装
最本质的原理是通过python对c++的接口实现的
(我也尝试过编译mediapipe源码给生成DLL文件,只能说现在各方面条件还不允许,不是网络问题,就是编译问题,能不能成功看运气,最后虽然成功了,但卡在了部署阶段)
1.创建新项目
通过visual studio 2019创建一个新项目,我选择的是控制台应用,毕竟展示出来给大家看,也可自己打包成静态库

2.在pose_demo.cpp中复制该代码
#include<iostream>
#include<Python.h>
#include <numpy/arrayobject.h>//numpy的头文件
#include<opencv/cv.hpp>//opencv的头文件
using namespace cv;
using namespace std;
PyObject* Init_Hand_Model() {
//加载numpy相关的库
import_array();
//命令行执行语句
PyRun_SimpleString("import sys");
PyRun_SimpleString("sys.path.append('./script')");
//PyImport_ImportModule:动态加载python模块,相当于导入python脚本文件
PyObject* pModule = PyImport_ImportModule("infer");
if (pModule == NULL) {
cout << "pModule not found" << endl;
}
//调用模型加载
PyObject* pFunc_load = PyObject_GetAttrString(pModule, "load_model");
if (pFunc_load == NULL || PyCallable_Check(pFunc_load) == NULL) {
cout << "pFunc_load not found!" << endl;
return 0;
}
PyObject_CallObject(pFunc_load, NULL);
//准备推理模型
PyObject* pInfer = PyObject_GetAttrString(pModule, "infer_image");
if (pInfer == NULL || PyCallable_Check(pInfer) == NULL) {
cout << "pInfer not found!" << endl;
return 0;
}
Py_DECREF(pModule);
Py_DECREF(pFunc_load);
return pInfer;
}
cv::Mat Hand_Infer(cv::Mat img, PyObject* pInfer,int *res)
{
PyArrayObject* array_com = NULL;
PyObject* pRet = NULL;
npy_intp dims[] = { img.rows, img.cols, img.channels() };
//生成包含这个多维数组的PyObject对象,使用PyArray_SimpleNewFromData函数,
//第一个参数2表示维度,第二个为维度数组Dims,第三个参数指出数组的类型,第四个参数为数组
PyObject* pValue = PyArray_SimpleNewFromData(3, dims, NPY_UINT8, img.data);
PyObject* pArgs = PyTuple_New(1);
PyTuple_SetItem(pArgs, 0, pValue); /* pValue的引用计数被偷偷减一,无需手动再减 */
pRet = PyObject_CallObject(pInfer, pArgs);
Py_DECREF(pValue);
Py_DECREF(pArgs);
// 解析返回结果
//PyArrayObject* array_com;
*res = -1;
PyArray_OutputConverter(PyList_GetItem(pRet, 0), &array_com);
npy_intp* shape = PyArray_SHAPE(array_com);
Mat com(shape[0], shape[1], CV_8UC3, PyArray_DATA(array_com));
PyArg_Parse(PyList_GetItem(pRet, 1),"i",res);
return com;
}
int hand_infer_by_camera() {
//初始化python解释器
Py_Initialize();
PyObject* pInfer = Init_Hand_Model();
VideoCapture cap(0);
if (!cap.isOpened())
{
printf("Can not open a camera\n");
return -1;
}
while (true)
{
Mat img;
cap >> img;
if (img.empty())
break;
cv::flip(img, img, 1);
int* res = new int;
Mat com = Hand_Infer(img, pInfer, res);
cout << *res;
cv::imshow("com", com);
cv::waitKey(10);
/*
cv::imshow("pha", pha);
cv::waitKey(0);
*/
img.release();
}
Py_DECREF(pInfer);
Py_Finalize();
return 0;
}
int main()
{
hand_infer_by_camera();
return 0;
}
到现在为止已经完成了一大半,还有很多报红的信息,别急,现在处理
3.环境配置
项目改为Release X64
配置项目属性
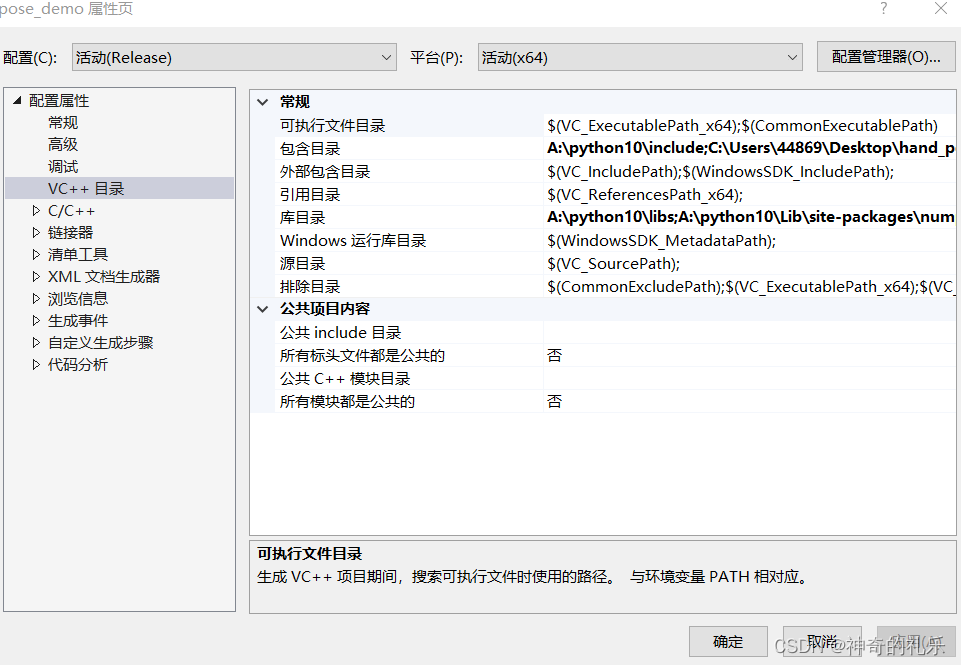
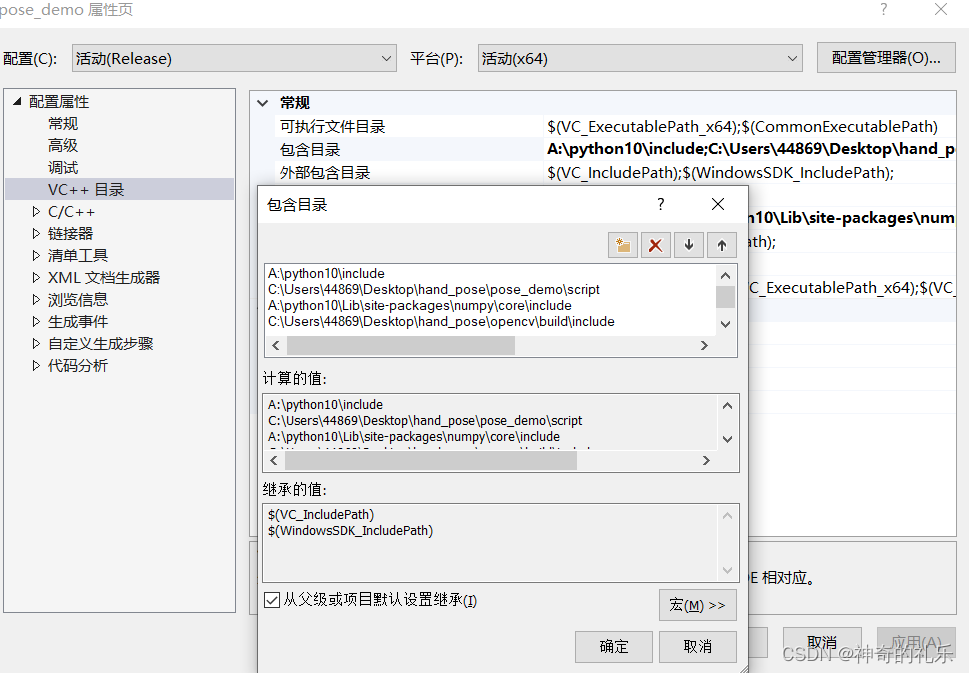
3.1包含目录的设置
项目include包含,python环境的include,script文件夹(gitee就能下载,里面就是infer.py),opencv下build/include,numpy/core/include
numpy在python的包文件夹里面,opencv自行下载
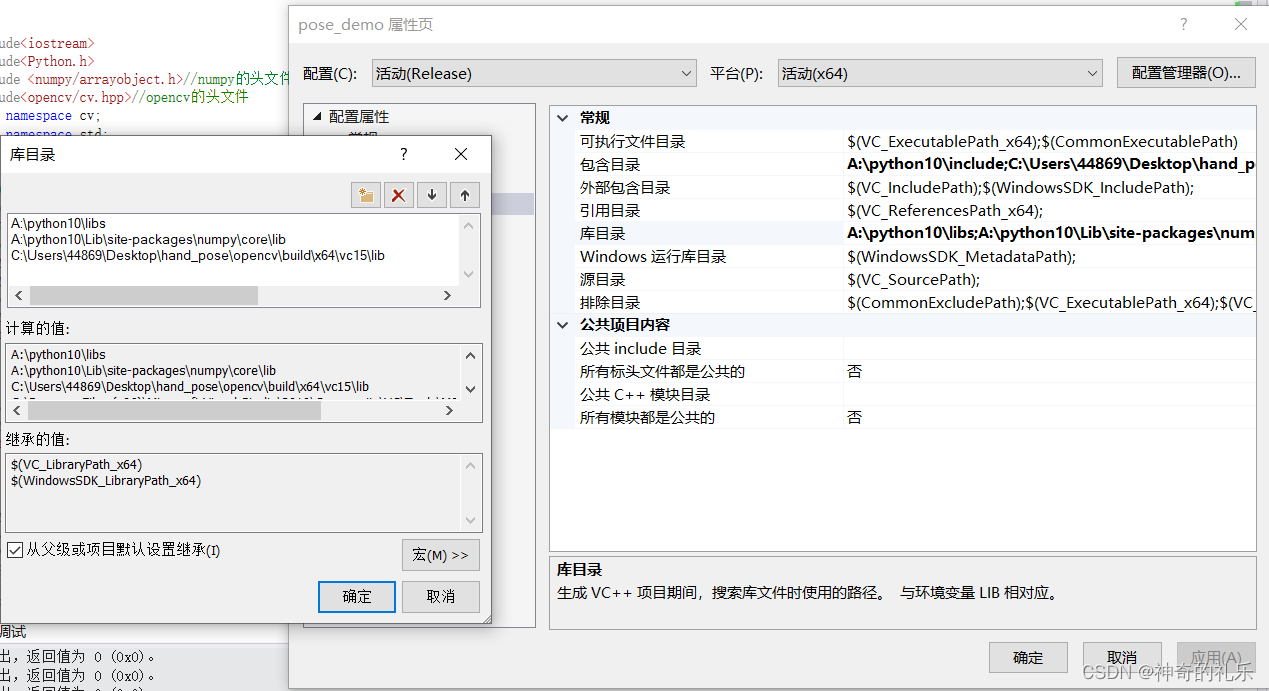
3.2库目录设置
python10环境下libs,numpy\core\lib,opencv\build\x64\vc15\lib设置3个lib路径即可
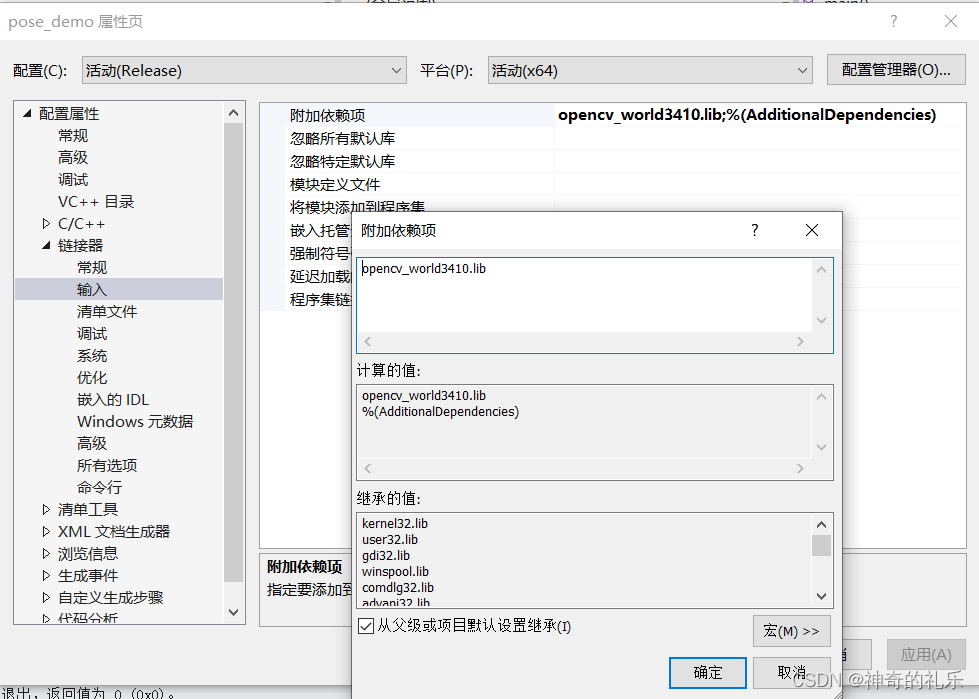
3.3附加依赖项
只需要配置opencv_world3410.lib即可
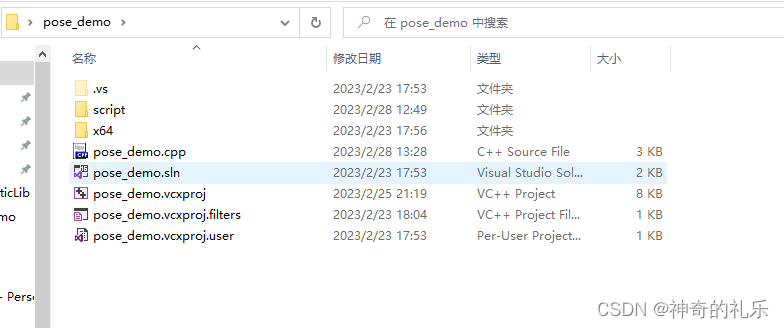
3.4设置script文件路径
前往https://gitee.com/cnlycs/hand_static-lib下载即可
把该文件夹放在pose_demo.cpp同一文件下即可
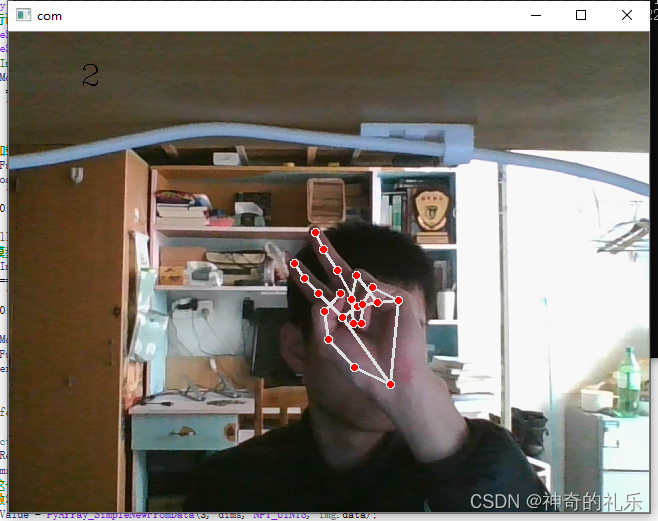
4.运行查看效果
好博客就要一起分享哦!分享海报
此处可发布评论
评论(0)展开评论
展开评论